05 Collision Detection
Intro#
- = physics simulation
- Naive method
- 直接判断两个像素结合是否有交集
- low efficiency
Rect Collision Algorithm#
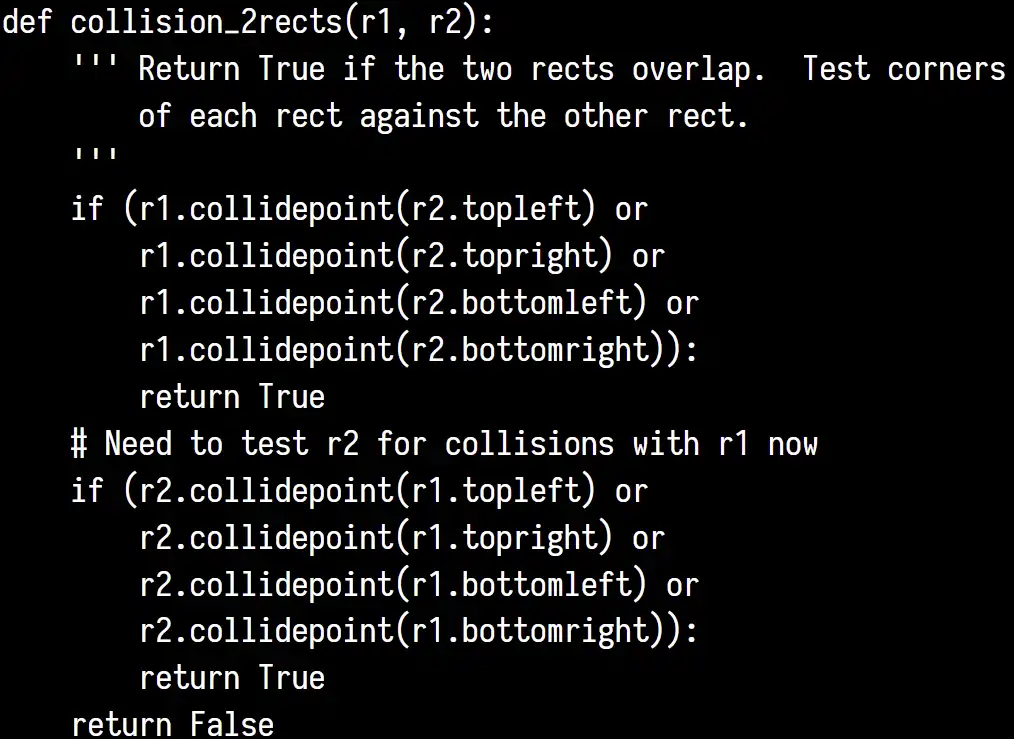
Warning
如果一个 rect 完全在另一个 rect 内部,可能会出现没有 collide 的判断 所以要双向判断
{python}rect1.colliderect(rect2)也可以
This is a bad approach
- Tyranny of numbers: 需要比较太多次
- Move-through: 一帧内位移太大就会穿过
Step 1. Reduce checks#
- 没有移动的 obj,不需要和其他没有移动的 obj 进行检测
- 可以穿模的 obj (e.g. fire, grass) 不需要参与检测
- 将 obj 按照 group 组织,例如它们的相对位置不变时
- 距离较远的 obj 之间不需要进行检测,距离的阈值根据游戏需要来确定
- 屏幕之外的 obj 不一定需要进行检测,FPS
- 按照 area 进行划分,一些 obj 只会在一些 area 内部
- partitioning
- 使用 quadtree 来组织 obj
Partitioning#
Quadtree#
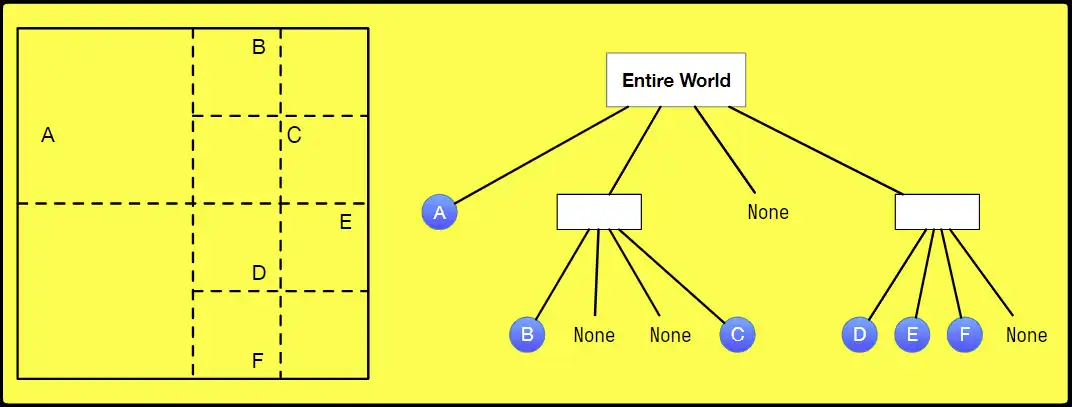
- might be managed based on classes of objs
- e.g. a quad tree of all alien fighter ships
- 方便寻找最近邻
- \(O(\log N)\) search
Tip
- in 3-d? Octree!
- BSP(Binary Space Partitioning) Tree
- K-d tree 是另一种方法,是一种特殊的 BSPtree
Automated Partitioning#
- Goldsmith-Salmon Inncremental Construction Method
- Bottom-up n-ary Clustering
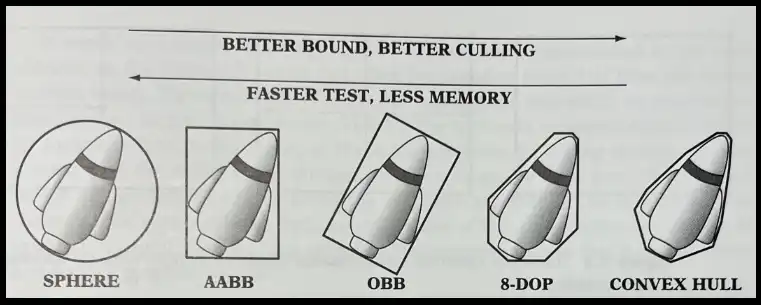
Step 2. Quick tests#
大部分没有被 reduce 的 check 其实都不会碰撞 rough test, 使用更加简单的形状来进行保守估计
Circle/Sphere test#
(omitted)
Bounding Box test#
- AABB
- OBB
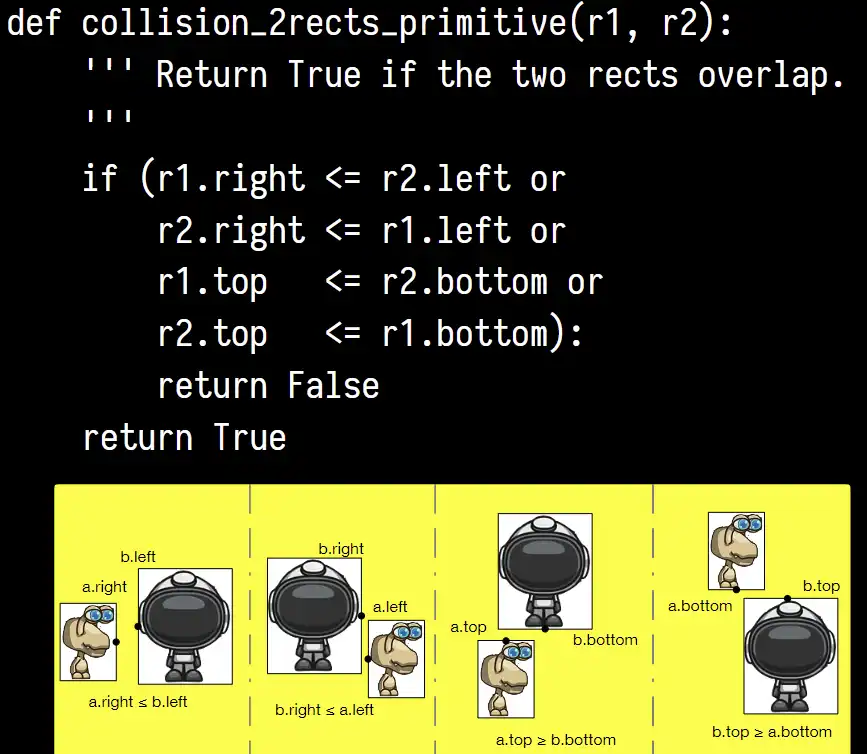
a better collide rect#
先判断是否存在某个 axis 上的 overlap,如果有再进行进一步判断
Capsule test#
- 主要是人物的近似
- 上下用 circle test,中间用 bounding box
Step 3. Precise tests#
经过前两个步骤筛选后的 obj 需要进行精细的测试
Swept Sphere Algorithm#
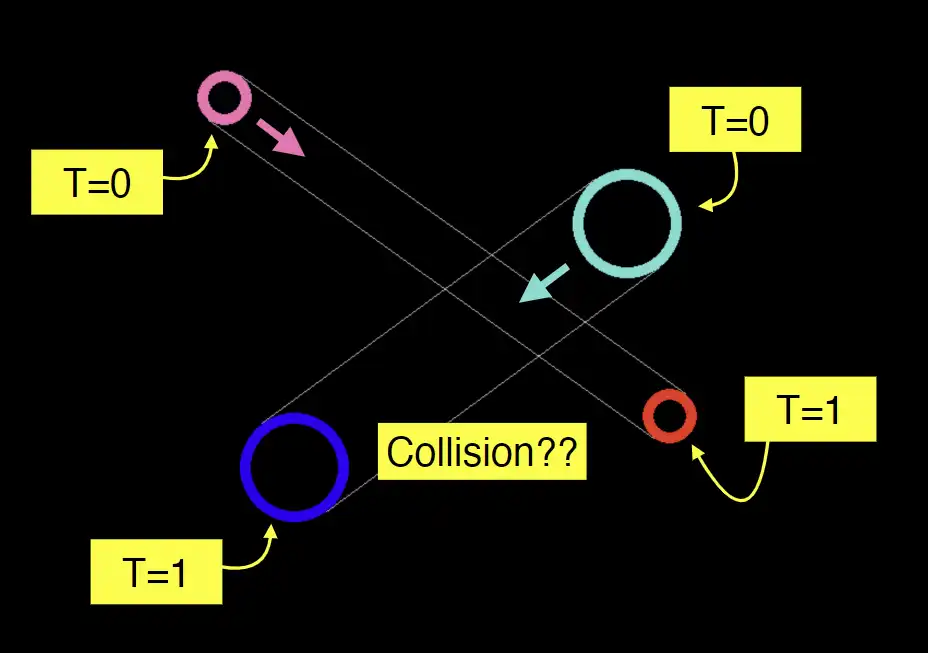
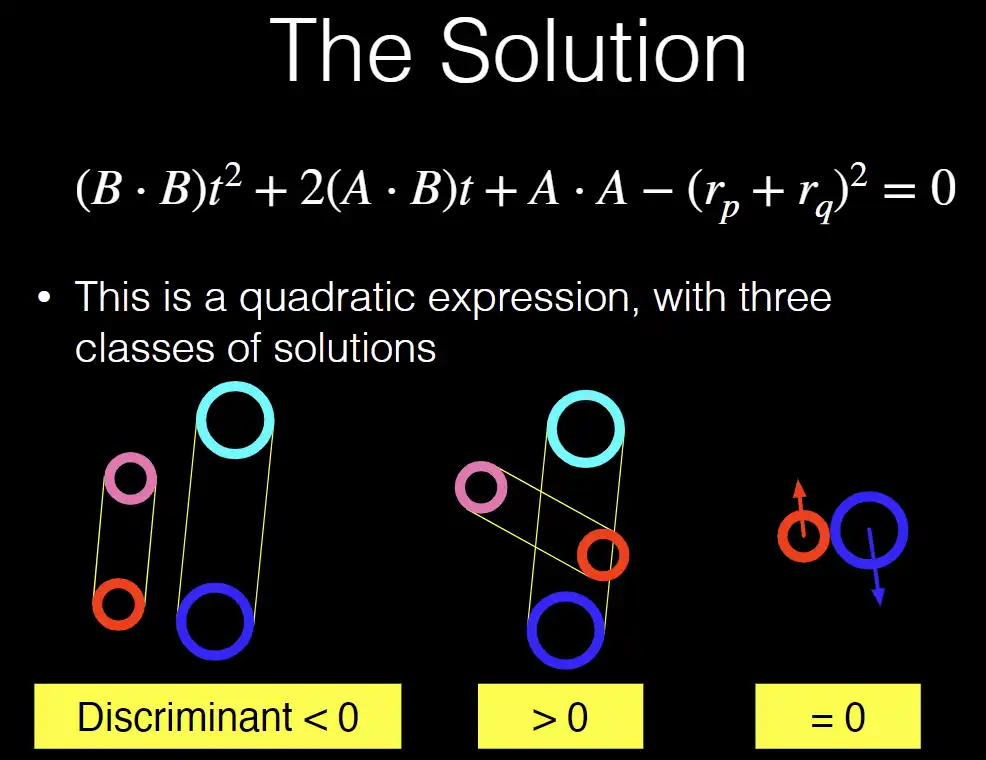
- 上面的方程代表,求解时间 \(t\),使得中心距离为半径之和
- 所以根据判别式就能判断是否发生了碰撞
- 如果 \(\Delta>0\),需要求解 \(t\)
- 如果 \(t \in(0,1)\),会发生碰撞
- 否则,不会发生碰撞
- 否则,不会发生碰撞
- 如果 \(\Delta>0\),需要求解 \(t\)
Step 4. Resolve Collisions#
- 子弹击中目标
- 撞墙、速度反向
- 弹性碰撞
- 计算碰撞点
- 碰撞切面
- 速度大小
- 结合 swept sphere 的结果